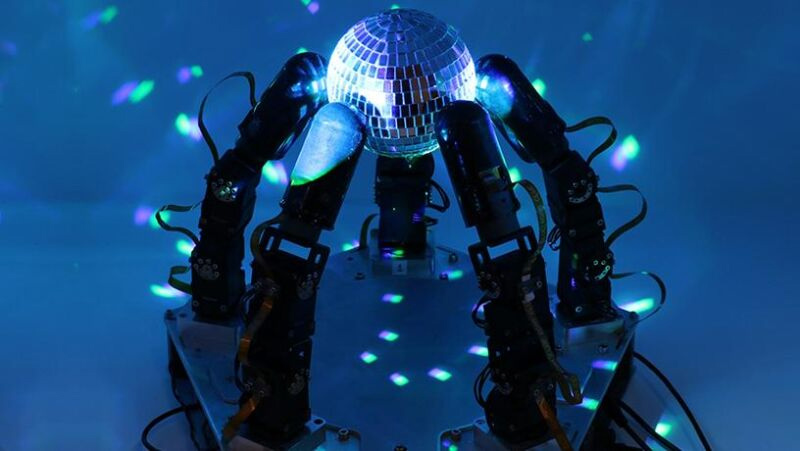
Naučnici sa kolumbijskog Univerziteta razvili su robotsku ruku sa visokim nivoom osetljivosti i spretnosti u rukovanju stvarima nalik ljudima, prenosi ArsTechnica.
Iako je čovečanstvo i dalje daleko od bioničkih i razumnih robota poput onih iz Zvezdanih staza ili Terminatora, naučnici su ovom robotskom rukom napravili korak ka takvom, naprednom, a pomalo i strašnom, razvoju robotike.
Naime, oni su morali da integrišu više različitih vrsta mašinskog učenja kako bi im to uspelo. Njihova robotska ruka nije sposobna samo da podiže i spušta stvari na komandu, već je toliko osetljiva da može da prepozna šta dodiruje, kao i da promeni položaj svojih prstiju kako bi bolje držala predmete, što je poznato kao manevar „hod prstima“. Uz to, sve ove mogućnosti može da radi čak i u mraku, što dodatno pojačava tezu da oseća stvari koje dodiruje.
Robotska ruka i „Prostor stanja“
Da bi došli do ruke koju su napravili, naučnici su morali da pronađu najefikasniji način da se ona kreće kroz strukturu takozvanog prostora stanja. Struktura prostora stanja je u stvari svaka poznata moguća konfiguracija sistema i ona opisuje kako robot treba da prelazi sa jednog na drugi korak unutar tog prostora. Različitim metodama mašinskog učenja moguće je obučiti robote kako da urade tako nešto.
Međutim, naučnici sa Univerziteta Kolumbija kažu da su koristili novu metodu za postizanje spretne robotske manipulacije složenijim objektima, uz paralelno sprečavanje ispadanja objekata i to bez pasivnih potpornih površina.
Jedna od uobičajenih metoda je poznata kao učenje sa pojačanjem (reinforcement learning/RL) što podseća na pristup dobar i loš bot. Odnosno, kada kontrolni softver robota odradi ono što bi trebalo, on biva nagrađen, a kada pogreši bude kažnjen. To znači da uči putem više pokušaja i ispravljanja grešaka sve dok ne prepozna šta bi trebalo da uradi.
Nedostaci ove metode ogledaju se u posledici, čak i minimalnog, odstupanja od očekivanog stanja, koja je u stvari ispuštanje objekata koje robot drži.
Baš zbog toga, tim naučnika je uz RL metod koristio i algoritme za planiranje zasnovane na uzorkovanju (SBP) kako bi pružio svojoj robotskoj ruci bolje „razumevanje“ odnosno držanje u strukturi prostora stanja. SBP metod ne mora da spremi svaki mogući skup pokreta da bi se robot lakše kretao kroz prostor stanja, već nasumičnim uzorkovanjem različitih putanja obezbeđuje kretanje.
Samim tim, svaki uspešni pokušaj robota da uradi ono što bi trebalo, čuva se kao nova opcija koja se dodaje digitalnom stablu uspešnih pokreta. Stablo uspešnih pokreta je baza na koju robot putem veštačke inteligencije može da se vrati kako bi pronašao rešenje za problem na koji je naišao. No, čak i kombinovanjem ove metode i dalje postoji problematika oslanjanja na ono što je robot ranije radio, pa odstupanje od očekivanog stanja i dalje može predstavljati prepreku.
Naučnici kažu da im je cilj da njihova robotska ruka može da manipuliše težim predmetima, kao i konkavnim oblicima, bez ispadanja.
Slanje povratnih informacija za bolje manevrisanje
Da bi robotska ruka mogla lako da manevriše prstima, bilo je potrebno da pošalje više povratnih informacija, što većina robota ne može. Naučnici su tu prepreku rešili tako što su na pomenute metode dodali još jedan algoritam za „brzo istraživanje nasumičnog stabla“ (RRT).
RRT algoritam je u stvari sposobnost robota da rukuje malo težim predmetima tako što pronalazi odgovarajuću granu svog digitalnog stabla uspešnih pokreta koja mu pokazuje najkraći put do uspešno obavljenog zadatka.
Kombinacija ovih metoda mašinskog učenja na kraju je dovela do robotske ruke koja je zaista pionir u uspešnom i osetljivom držanju predmeta nalik ljudima. Ona može da zadrži najmanje tri prsta u kontaktu nekim predmetom i da potom uravnoteži i prilagodi silu koju koristi svaki prst kako bi zadržala predmet u slučaju da on krene da joj ispada.
S obzirom na to da robotska ruka ovih naučnika funkcioniše i u mraku, kada opipavanjem prepoznaje svoju okolinu, odnosno koristi proprioceptivni osećaj za koji su sposobni mnogi živi organizmi, mogla bi se koristiti kao napredni oblik pomoći ljudima sa smetnjama u motorici.